

|
|
|
|
|
|
|
|
| RESEARCH | |
My research interests are bio-inspired autonomous robots, legged locomotion and dynamic locomotion gaits. I am also interested in actuation control with passive compliant mechanisms. Furthermore, my research area includes real-time operating systems and embbedded systems. You can find detailed information about my research projects. |
|
| Current Projects | |
|
|
| Bio-Inspired Spinal Actuation in Quadruped Robots | |
| Bilkent University - Bilkent Dexterous Robots and Locomotion Lab, 2009 - present | |
| Overview: | |
Being inspired from spinal structure in fast running land mammals, this research focuses on developing new quadruped robot models with additional spine actuation. Differing from standard quadruped robots with stiff backed trunk designs, the new robot model developed in this research embodies flexible back spine mechanism which is shown to increase fast and dynamic locomotion performance in means of running speed, hopping height and energy transformation. Along with new gait controllers, simulations performed so far demonstrates promising future for spinal actuation for autonomous running legged robots. Clich here for further details. |
|
| Past Projects | |
 |
|
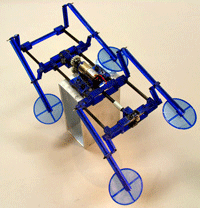
| Bio-Inspired Amphibious Runner Robot | |
| Carnegie Mellon University - NanoRobotics Lab, September 2010 - January 2011 | |
| Overview: | |
This research aims to improve the novel gecko inspired water running robot developed in NanoRobotics Lab (2008). The previous runner robot could only run on water or land but not on both. The aim of this research was to develop new compliant foot structures as well as compliant gait controllers to achieve successful transition between land and water terrains while running. The current amphibious robot embodies a fully compliant magnet-spring-damper mixed foot ankle system on each of its feet. This system provides an autonomous locomotion on both terrains with motor speeds reaching 7 Hz. The data about the current amphibious robot will be available here after publication right have been granted. Click here for details about the research on the previous water runner robot. |
|
 |
|
| Real Time Operating System for SensoRhex | |
| Bilkent University - Bilkent Dexterous Robots and Locomotion Lab, 2009 - 2010 | |
| Overview: | |
SensoRhex is a hexapod robot platform which is capable of achieving high speeds along with increased maneuverability on deformed land terrain. This autonomous robot is able to perform mutliple tasks such as terrain rovering, visual SLAM and motion planning with its on-board power and control systems. The aim of this research is to develop and configure an on-board real-time operating system which will enable the robot perform various tasks and overcome possible natural obstacles while maintaining its dynamic locomotion throughout its path. Click here for details about SensoRhex project on BDRL group website. |
|
 |
|
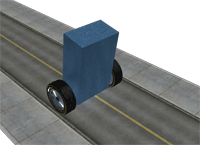
| Autonomous Dynamic Balancing on 2 Wheels | |
| Bilkent University - Computer Engineering Department, 2008-2009 | |
| Overview: | |
This project has been developed along with "Embedded Systems" course which aimed to perform autonomous dynamic balancing on 2 wheels. The platform developed for the project had 2 wheels actuated by fast-response sensors to detect changes in body pitch angle. The basic principle behind the system is inverted pendulum dynamics, which suggests to move the vertical platform on the axis direction where body pitch angle is decreasing. |
|
